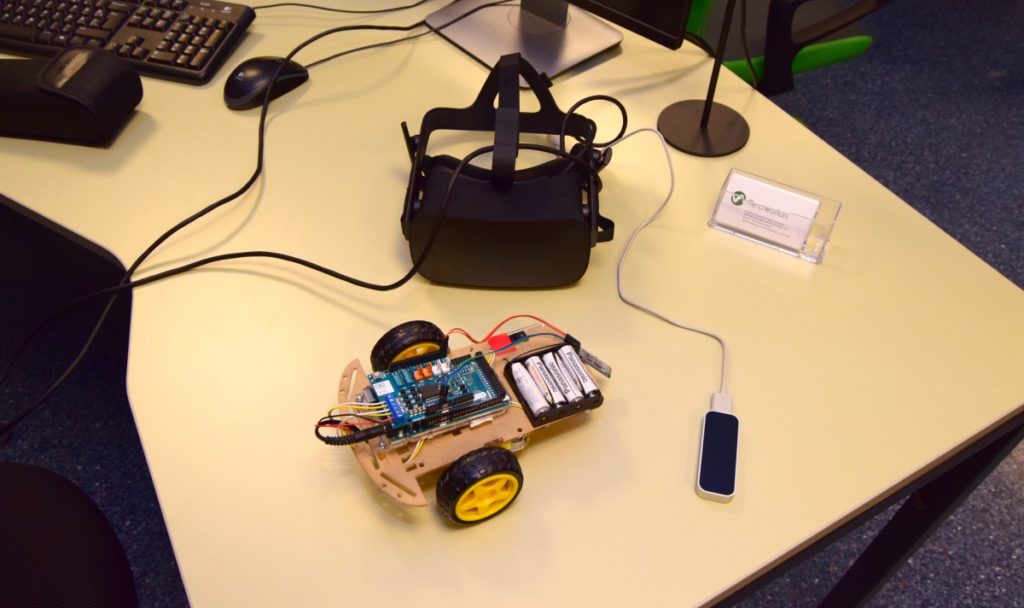
The goal of this project was to develop a coherent mechanism for intuitive remote control of mobile robots using Leap Motion. The applications were co-designed in Virtual Reality for so called digital twins of mobile robots.
| Student | Various students |
| Supervisor | Ahmet Köse |
